Ein Team von Omega-Ingenieuren unter der Leitung von Ken Leibig, Director of Engineering, machte sich daran, eine bessere, effizientere und kostengünstigere Alternative zur derzeitigen Methode zur genauen Messung der Temperatur von flüssigen Medien in einem Rohr entwickeln konnte – nämlich die Verwendung einer invasiven Tauchsonde.
Das Ergebnis ihrer Arbeit: Omegas bahnbrechender hochgenauer, nicht-invasiver Klemm-Temperatursensor HANI.

Der HANI lässt sich so einfach wie ein Oberflächensensor installieren, bietet jedoch die hohe Genauigkeit und Leistung eines Tauchsensors. Er vereint das Beste aus beiden Welten und ist eine bahnbrechende Neuerung für Fachleute in einer Vielzahl von Branchen – von der Lebensmittel- und Getränkeindustrie über die Pharmaindustrie bis hin zur Luft- und Raumfahrt.
Aber wie funktioniert er?
Fouriersches Gesetz der Wärmeleitung
Die Technologie, die den HANI-Sensor möglich macht, basiert auf dem Gesetz der Wärmeleitung, das auch als Fourier'sches Gesetz bekannt ist. Das Fourier-Gesetz besagt, dass die Wärmeübertragungsrate durch Materialien proportional zum negativen Temperaturgradienten und zur Fläche ist, die im rechten Winkel zu diesem Gradienten steht und durch die die Wärme fließt.
Die HANI-Technologie basiert auf der Differentialform des Fourier-Gesetzes der Wärmeleitung, das besagt, dass die lokale Wärmeflussdichte q gleich dem Produkt aus Wärmeleitfähigkeit k und dem negativen lokalen Temperaturgradienten ist.

Die Wärmeflussdichte ist die Energiemenge, die pro Zeiteinheit durch eine Flächeneinheit fließt. Für viele einfache Anwendungen wird das Fourier-Gesetz in seiner eindimensionalen Form verwendet:

Wenn wir unsere Aufmerksamkeit auf eine Platte mit einer Wandstärke „∆X“ richten, kann dieselbe Wärmeflussdichte auf der Grundlage des Temperaturgradienten zur Temperatur an der Außenseite der Platte minus der Temperatur an der Innenseite der Platte geteilt durch die Dicke dieser Platte vereinfacht werden.

Wenn wir diese Gleichung dann umstellen, können wir die Temperatur auf der Innenseite der Platte berechnen.

- „q” = Wärmeflussdichte
- „k” = Wärmeleitfähigkeit
- ▽ = Temperaturgradient
- T out = Temperatur (außerhalb des Rohrs)
- T in = Temperatur (innerhalb des Rohrs)
- ∆X = Wandstärke
Solange wir also die Wärmeleitfähigkeit und die Dicke der zu messenden Platte kennen, können wir die Temperatur auf der anderen Seite berechnen. Natürlich gilt diese Gleichung für eindimensionale Wärmeübertragung. Für ein Rohr mit der Dicke t und dem Außenradius r muss daher ein Formfaktor angewendet werden:

Dieser kann in unsere vorherige Gleichung für eindimensionale Wärmeübertragung eingesetzt werden:

Lassen Sie uns das Ganze einmal aufschlüsseln:
Nehmen wir an, Sie haben ein Rohr, durch das eine Flüssigkeit fließt – diese Flüssigkeit hat die Temperatur T in, und genau diese wollen wir berechnen. Sie möchten die Temperatur dieses flüssigen Mediums wissen. Vielleicht sogar an einem bestimmten Punkt innerhalb Ihres Systems.
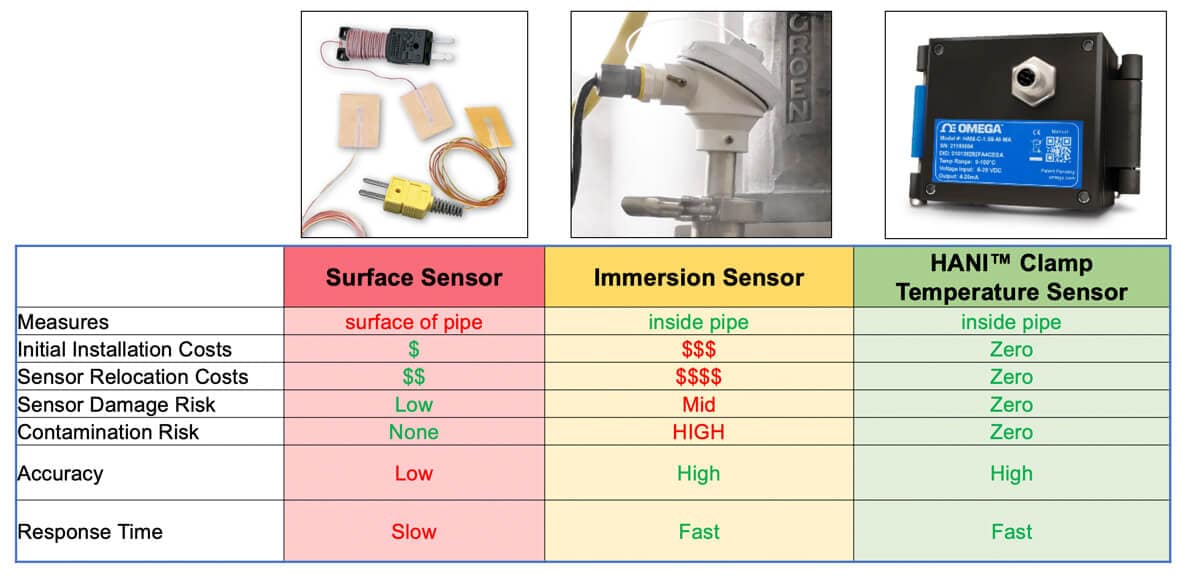
Sie könnten einen herkömmlichen Oberflächensensor verwenden, aber damit würden Sie an Genauigkeit einbüßen – etwas, das Fachleute in einer Vielzahl von Branchen einfach nicht tun können.
Oder Sie könnten einen Tauchsensor verwenden, der aufgrund seiner hohen Genauigkeit für die meisten Fachleute die erste Wahl ist. Tauchsensoren greifen jedoch in das System ein, was häufig zu Problemen führen kann – Problemen wie Schwierigkeiten bei der Installation, zusätzlichen Kosten für die Wartung, Risiken bei Verunreinigungen und unerwünschten Ausfallzeiten.
Jetzt gibt es jedoch eine dritte Option: den HANI.
Mit seinem innovativen Klemmdesign lässt sich der HANI-Sensor wie ein Oberflächensensor montieren und kann buchstäblich in Sekundenschnelle installiert werden – Sie müssen ihn lediglich an der Außenseite eines Rohrs befestigen und verriegeln, und schon beginnt er mit der Berechnung der Temperatur im Inneren des Rohrs. Es gibt keinerlei invasive Sonden – daher sind keine Bohr- oder Schweißarbeiten erforderlich, wie sie bei der Installation von Tauchsensoren notwendig sind. Und da der HANI nicht invasiv ist, betreibt er den Betrieb ohne Kontakt mit dem Prozessmedium im Rohr – wodurch das Risiko eines Sensorbruchs oder einer Sensordrift ausgeschlossen ist.

Die Installation des HANI erfolgt also wie die eines Oberflächensensors. Das ist großartig, aber wie sieht es mit der Genauigkeit aus? Um die Ungenauigkeiten dieser Oberflächensensoren zu überwinden, verwendet der HANI zusätzlich zu einem sorgfältig gekoppelten Oberflächensensor einen Wärmeflusssensor.
Das bedeutet, dass HANI über einen RTD verfügt, der an der Außenseite des Rohrs angebracht ist – ähnlich wie ein Oberflächentemperatursensor – und die Temperatur der Außenseite des Rohrs misst, die wir als T out bezeichnen können.
HANI verfügt außerdem über einen Wärmeflusssensor, der ebenfalls an der Außenseite des Rohrs angebracht ist. Ein Wärmefluss-Sensor ist im Grunde genommen ein Dünnschicht-Thermopile und gibt Auskunft über die Menge an Wärmeverlust oder Wärmeeintrag in das Rohr. Das ist die Variable „q“ in der Fourier-Gleichung.
Der HANI verwendet diese beiden Werte – T out und den Temperaturgradienten – und speist sie in seinen proprietären Algorithmus ein.
Darüber hinaus berücksichtigt es einige Benutzereingaben: Rohrdurchmesser, Rohrdicke und Rohrmaterial.
THANI ist das Ergebnis unseres proprietären Algorithmus und entspricht im Wesentlichen der Temperatur im Inneren des Rohrs (mit einer Genauigkeit von plus/minus einem halben Grad).
Zu schön, um wahr zu sein?
Um die Wirksamkeit der HANI-Technologie zu veranschaulichen, führten Ken und sein Team einige Experimente durch. Zunächst wurde ein flüssiges Medium bei kalter Temperatur durch ein Rohr geleitet. An diesem Rohr hatte das Ingenieurteam einen Tauchfühler installiert (sodass sich dessen Sonde im Inneren des Rohrs befand), einen Oberflächenfühler an der Außenseite des Rohrs montiert und einen HANI-Sensor ebenfalls an der Außenseite des Rohrs befestigt. Nach acht Sekunden wurde ein Ventil geöffnet, das heißes flüssiges Medium einmischte.
Ken und sein Team wollten die Genauigkeit und die Ansprechzeiten dieser drei Arten von Sensoren vergleichen.
Diese Grafik veranschaulicht, was dabei geschah.
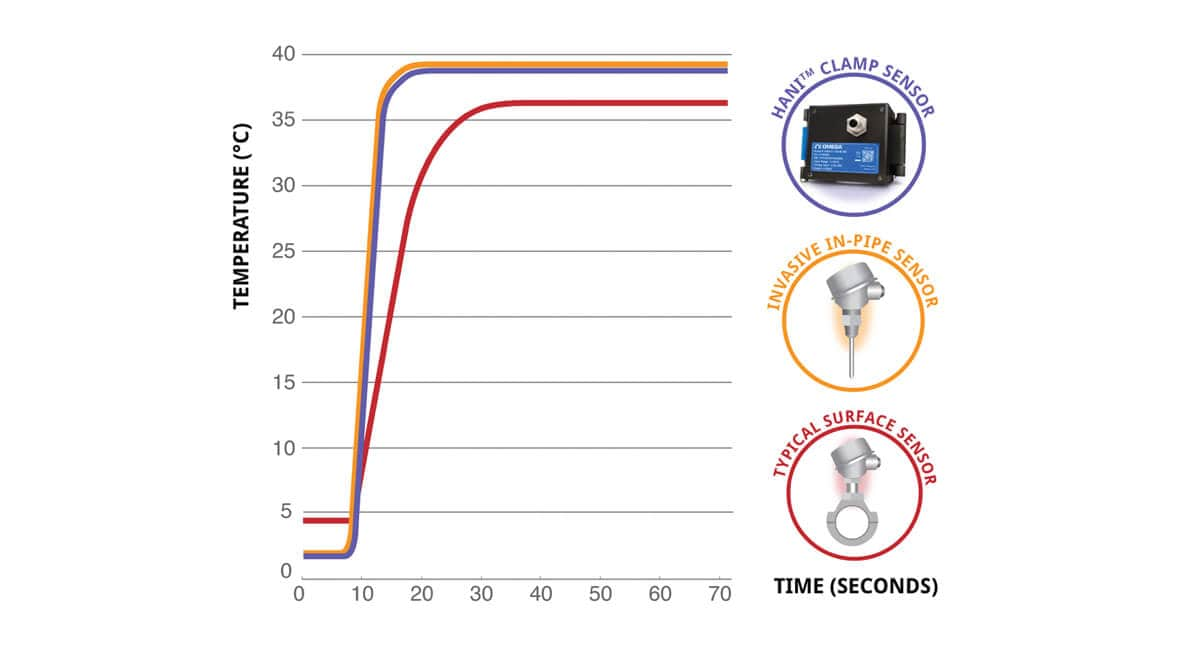
Sie können erkennen, dass der Oberflächensensor, der rot dargestellt ist, im stationären Zustand Ungenauigkeiten aufweist: Sowohl bei niedrigeren als auch bei höheren Temperaturen tendiert er zur Umgebungstemperatur – sodass es zu einer Abweichung von mindestens plus/minus 10 % kommt. Diese Oberflächensensoren sind sehr ungenau und reagieren sehr langsam.
Der Tauchsensor hingegen ist gelb, äußerst genau und reagiert sehr schnell.
Und der blaue HANI liegt genau über der Ansprechzeit des Tauchfühlers – was zeigt, dass er genauso genau und reaktionsschnell ist wie der Tauchfühler.
Der HANI-Klemmentemperatursensor von Omega ist, einfach gesagt, das Beste aus beiden Welten – und IDEAL für so viele verschiedene Anwendungen, bei denen Genauigkeit entscheidend ist, invasive Sonden jedoch Probleme verursachen. Erfahren Sie mehr über den HANI-Sensor von Omega hier.

Was ist ein Tauchsieder? Arten von Tauchsieder-Heizelementen Was ist ein Tauchsieder?

Was ist ein industrieller Elektroheizkörper? Was ist ein Industrieheizgerät?